Mecanismos
Se llama mecanismo a un conjunto de sólidos resistentes, móviles unos respecto de otros, unidos entre sí mediante diferentes tipos de uniones, llamadas pares cinemáticos (pernos, uniones de contacto, pasadores, etc.), cuyo propósito es la transmisión de movimientos y fuerzas. También se usa el términomecanismo para designar a las abstracciones teóricas que modelizan el funcionamiento de las máquinasreales, y de su estudio se ocupa la Teoría de mecanismos.
Basándose en principios del álgebra lineal y física, se crean esqueletos vectoriales, con los cuales se forman sistemas de ecuaciones. A diferencia de un problema de cinemática o dinámica básico, un mecanismo no se considera como una masa puntual y, debido a que los elementos que conforman a un mecanismo presentan combinaciones de movimientos relativos de rotación y traslación, es necesario tomar en cuenta conceptos como centro de gravedad, momento de inercia, velocidad angular, etc.
La mayoría de veces un mecanismo puede ser analizado utilizando un enfoque bidimensional, lo que reduce el mecanismo a un plano.
En mecanismos más complejos y, por lo tanto, más realistas, es necesario utilizar un análisis espacial. Un ejemplo de esto es una rótula esférica, la cual puede realizar rotaciones tridimensionales.
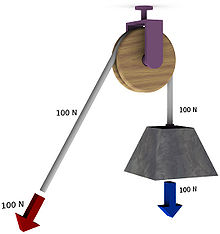
Una polea, es una máquina simple que sirve para transmitir una fuerza. Se trata de una rueda, generalmente maciza y acanalada en su borde, que, con el curso de una cuerda o cable que se hace pasar por el canal ("garganta"), se usa como elemento de transmisión para cambiar la dirección del movimiento en máquinas y mecanismos. Además, formando conjuntos —aparejos o polipastos— sirve para reducir la magnitud de la fuerza necesaria para mover un peso.
Según definición de Hatón de la Goupillière, «la polea es el punto de apoyo de una cuerda que moviéndose se arrolla sobre ella sin dar una vuelta completa»1 actuando en uno de sus extremos la resistencia y en otro la potencia.
 Leva es un elemento mecánico hecho de algún material(madera, metal, plástico, etc.) que va sujeto a un eje y tiene un contorno con forma especial. De este modo, el giro del eje hace que el perfil o contorno de la leva toque, mueva, empuje o conecte una pieza conocida como seguidor. Existen dos tipos de seguidores, de traslación y de rotación.
Leva es un elemento mecánico hecho de algún material(madera, metal, plástico, etc.) que va sujeto a un eje y tiene un contorno con forma especial. De este modo, el giro del eje hace que el perfil o contorno de la leva toque, mueva, empuje o conecte una pieza conocida como seguidor. Existen dos tipos de seguidores, de traslación y de rotación.La unión de una leva se conoce como unión de punto en caso de un plano o unión de línea en caso del espacio. De ser necesario pueden agregarse dientes a la leva para aumentar el contacto.
La leva y el seguidor realizan un movimiento cíclico (360 grados). Durante un ciclo de movimiento el seguidor se encuentra en una de tres fases. Cada fase dispone de otros cuatro sinusoidales que en el coseno de "fi" se admiten como levas espectatrices.
 Se denomina biela a un elemento mecánico que sometido a esfuerzos de tracción o compresión, transmite el movimiento articulando a otras partes de la maquina. En un motor de combustión interna conectan el pistón al cigüeñal,
Se denomina biela a un elemento mecánico que sometido a esfuerzos de tracción o compresión, transmite el movimiento articulando a otras partes de la maquina. En un motor de combustión interna conectan el pistón al cigüeñal,Actualmente las bielas son un elemento básico en los motores de combustión interna y en loscompresores alternativos. Se diseñan con una forma específica para conectarse entre las dos piezas, el pistón y el cigüeñal. Su sección transversal o perfil puede tener forma de H, I o + . El material del que están hechas es de una aleación de acero, titanio o aluminio. En la industria automotor todas son producidas por forjamiento, pero algunos fabricantes de piezas las hacen mediante maquinado
 Piñón
PiñónSe le llama piñón a la rueda de menos dientes de las dos que forman un engranaje. Si el piñón tiene pocos dientes se suelen fresar los dientes en el mismo eje motor.
Usos
- Generalmente los piñones se colocan en el eje motor (el piñón mueve a la rueda), y sirven para reducir la transmisión (velocidad de giro), pero aumenta la fuerza de palanca en la misma proporción.
- También pueden colocarse en el eje móvil (la rueda mueve al piñón), si se requiere aumentar la transmisión, aunque disminuye la fuerza de palanca en la misma proporción.
En ambos casos, la relación inversa velocidad-fuerza es debida a la ley de la palanca, pues los radios son los brazos de palanca.